Hamiltonian Monte-Carlo
Hamiltonian Monte-Carlo (HMC) (1) is a gradient-based Monte-Carlo technique that uses Hamiltonian mechanics to inform the Monte-Carlo sampler about the posterior distribution by integrating the orbit of the walkers as if they were particles in a potential. HMC calculates the acceptance-rejection probability based on the difference in energy.
HMC has favorable dimensional scaling over MCMC, and is widely used in machine learning inference problems.
Sampling through transformations
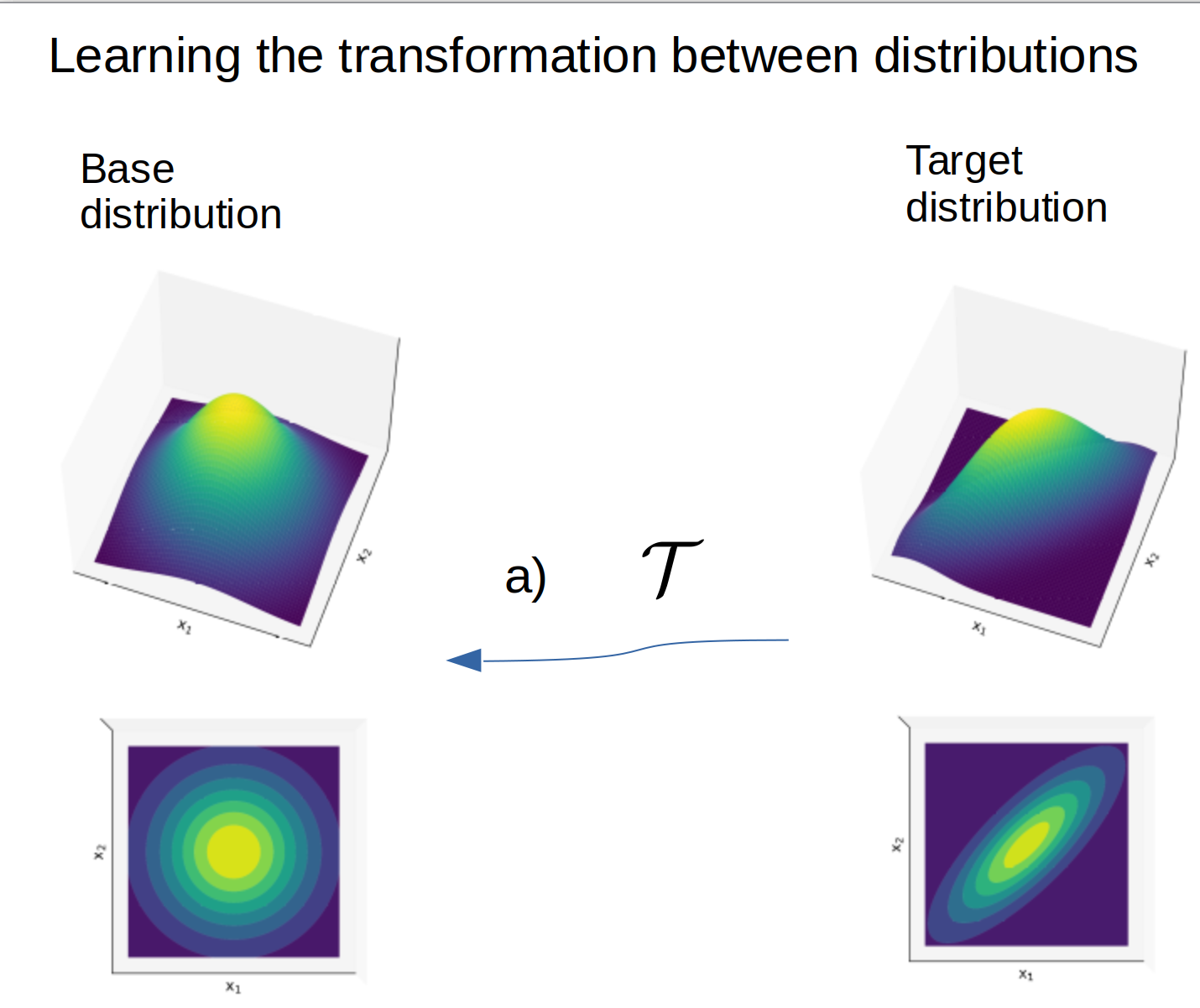
Recent studies (2) have shown that transforming a complicated posterior distribution to a simpler, more gaussian-like base distribution can benefit the performance of MCMC samplers when the shape of the target distribution is complex. In this approach the samples are generated on the base distribution and transformed to effectively sample the target distribution.
This was later looked at by (3) in the case of the HMC sampler, where they provided a method based on normalising flows to generate the transformation. These normalising flows themselves are symplectic transformations since they are volume preserving, and they are commonly used in data science techniques. Normalising flows transform a given distribution to a standard normal distribution, which means now we can rely on the base distribution being the same in any situation.
Action angle coordinates
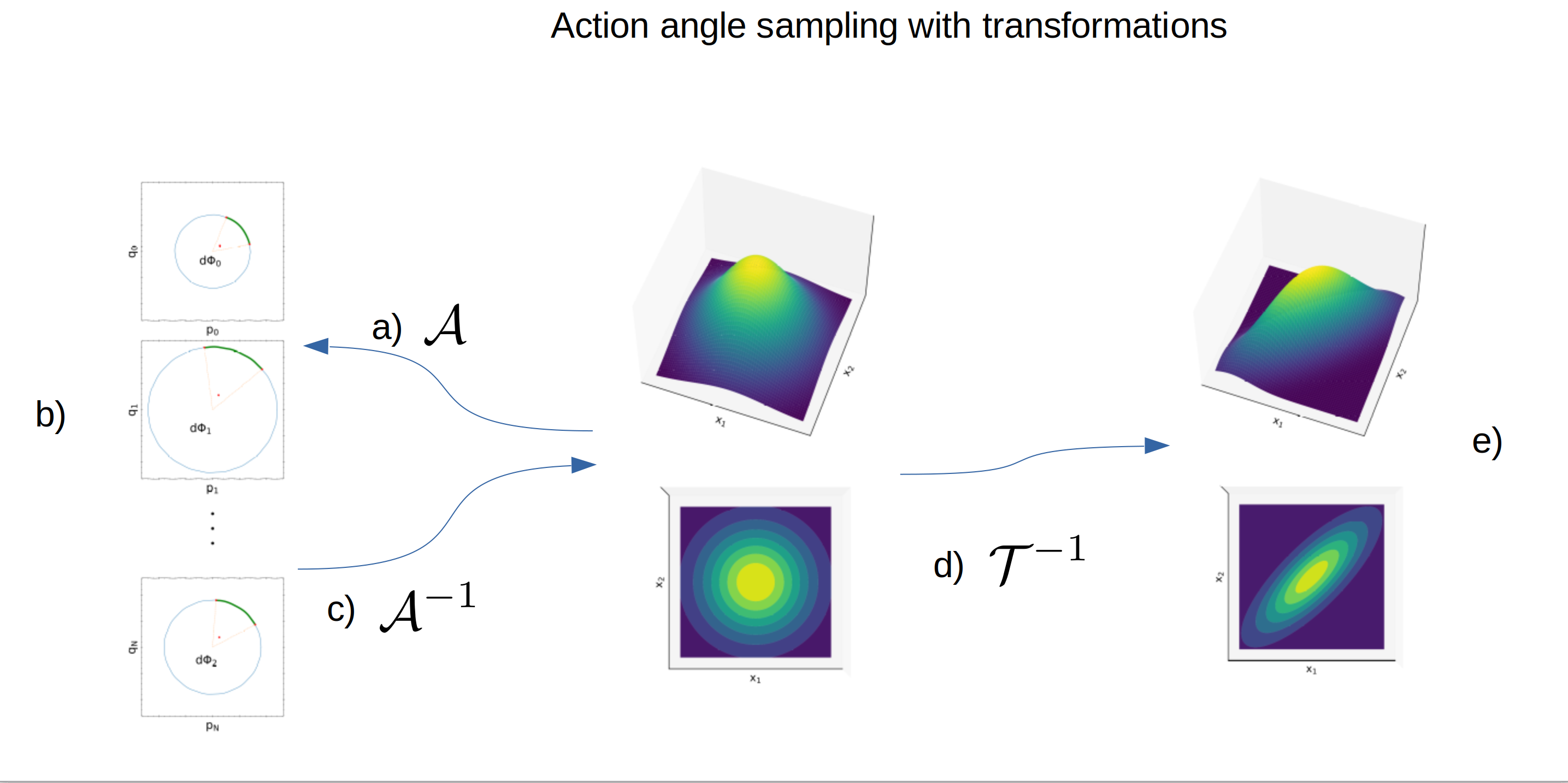
Since we know the exact shape of the base distribution, we can make use of a technique in Hamiltonian mechanics called action-angle coordinate transformations.
Action-angle coordinates are coordinates in which the Hamiltonian is fully described by integrals of motion (action). The action-angle transformations contain information about the orbit of a particle, and we can make use of them to integrate the particle on the base distribution by transforming to action-angle coordinates, shifting the angle and transforming back to the position-momentum coordinates.
Using action-angle transformations to integrate on the base distribution effectively also integrates the particle in the target distribution, and as long as the quality of the transformation is sufficient, the energy is conserved in the target distribution as well.
The analytic description for Hamiltonian systems with a standard normal as the potential can be written as a set of independent harmonic oscillators. The action-angle transformation for harmonic oscillators is a well-known transformation, which has a simple analytic form.
We use the transformations between the target distribution and the base distribution, and the transformation to and from action-angle coordinates as a new sampling method called Action-Angle Hamiltonian Monte-Carlo (AAHMC).
References